Mingjie Zhang (张明杰)
I am an MPhil student at The Hong Kong University of Science and Technology (Guangzhou), supervised by Prof. Boyu ZHOU (周博宇) and Prof. Jun MA (马骏). I also work at STAR Robotics Lab, Southern University of Science and Technology.
My research lies at the intersection of Robotics and Embodied AI.

Current focus includes:
- Robot Navigation
- Spatial Intelligence
- Mobile Manipulation
- Active Exploration/Reconstruction
I am also interested in Vision-Language-Action (VLA), Agentic Systems, and Humanoid Robotics.
If you are interested in research opportunities or collaborations, feel free to reach out at zagerzhang@gmail.com or mzhang472@connect.hkust-gz.edu.cn.
Publications
* equal contribution † corresponding author
 | Chengkai Wu, Ruilin Wang*, Yixin Zeng*, Jiayuan Wang, Mingjie Zhang, Guiyong Zheng, Qun Niu, Juepeng Zheng, Jun Ma, Boyu Zhou† arXiv Preprint, 2026. |
 | Xinlu Yan*, Mingjie Zhang*, Yuhao Fang, Yanke Sun, Jun Ma, Youmin Gong, Boyu Zhou†, Jie Mei† IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026.  |
 | Guiyong Zheng, Yueting Ban, Mingjie Zhang, Juepeng Zheng, Boyu Zhou† IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026.  |
 | Mingjie Zhang, Yuheng Du, Chengkai Wu, Jinni Zhou, Zhenchao Qi, Jun Ma, Boyu Zhou† IEEE Robotics and Automation Letters (RAL), 2025. IEEE International Conference on Robotics and Automation (ICRA), 2026.  |
 | Mingjie Zhang*, Chen Feng*, Zengzhi Li, Guiyong Zheng, Yiming Luo, Zhu Wang, Jinni Zhou, Shaojie Shen, and Boyu Zhou† IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024. (Oral)  |
 | Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Boyu Zhou†, and Shaojie Shen IEEE International Conference on Robotics and Automation (ICRA), 2024. (Best Paper Award on UAV Finalists)  |
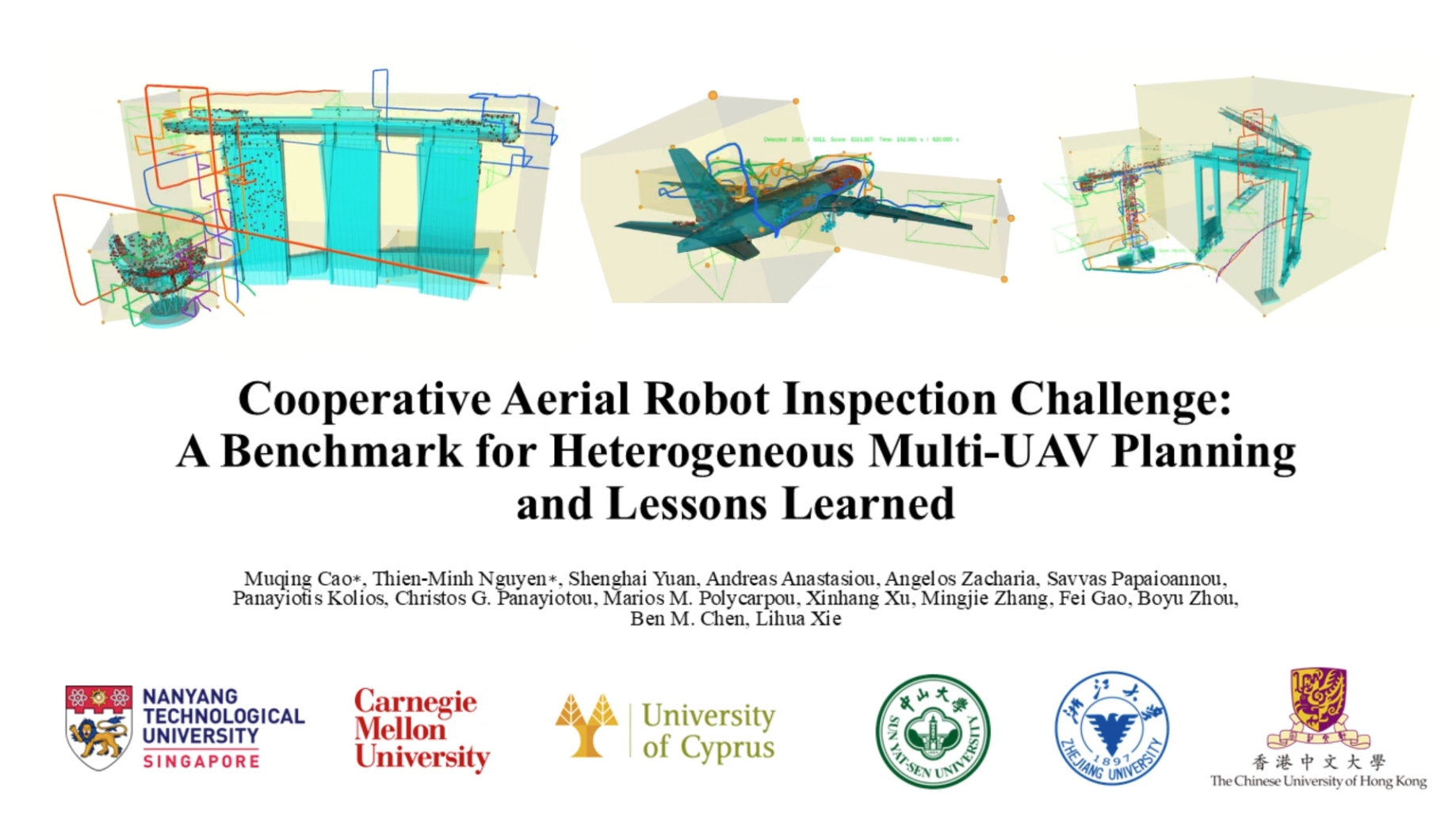 | Muqing Cao, Thien-Minh Nguyen, Shenghai Yuan, Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G Panayiotou, Marios M Polycarpou, Xinhang Xu, Mingjie Zhang, Fei Gao, Boyu Zhou, Ben M Chen, Lihua Xie IEEE Robotics Automation & Magazine (RAM), 2025. |
Service
- Conference Reviewer
- Journal Reviewer
Selected Honors
- IEEE ICRA Best Paper Award on UAV Finalists
- National Scholarship
Show more honorsHide extra honors
- Outstanding Graduate
- Outstanding Student
- Cooperative Aerial Robots Inspection Challenge 3rd Place
- Yat-sen Challenge of Intelligent Cooperative Robots 1st Prize
- National Robot Championship Competition First Prize
- International Underwater Robot Competition First Prize